Capteurs PSD : Principes et Applications
Les Position Sensitive Devices (PSD), ou détecteurs sensibles à la position, sont des dispositifs électroniques conçus pour mesurer la position d'un point lumineux incident sur leur surface active. Ils fonctionnent selon divers principes, mais dans les applications techniques, le terme PSD fait généralement référence à des photodiodes de grande surface, généralement des diodes PIN, dont les électrodes sont situées sur deux ou quatre côtés opposés de la surface de détection. La surface de la diode possède une résistance surfacique relativement élevée et uniforme.
Lorsqu'une diode PSD est exposée à un point lumineux, un photocourant est généré dans la zone d'illumination. Ce courant se répartit entre les contacts situés sur les bords de la diode en fonction de la position du point lumineux. Les formules utilisées pour calculer la position sont les suivantes :
X = k1 * (a+c-b-d) / (a+b+c+d)
Y = k2 * (a+b-c-d) / (a+b+c+d)
Où :
- a, b, c, d sont les courants mesurés aux quatre électrodes.
- k1, k2 sont des facteurs d'échelle.
L'un des principaux avantages de cette technologie est sa capacité à mesurer la position de manière continue, avec des fréquences de mesure pouvant dépasser 100 kHz. En plus de la position, l'intensité du signal lumineux peut également être mesurée.
Principes de Fonctionnement des PSD
Les PSD peuvent être classés en deux catégories principales, fonctionnant selon des principes distincts :
1. Capteurs à Surface Isotrope (PSD discrets)
Dans cette catégorie, les capteurs disposent d'une surface sensible isotrope qui fournit des données de position continues. Le terme technique PSD a été utilisé pour la première fois dans une publication de 1957 par J.T. Wallmark, faisant référence à l'effet photoélectrique latéral utilisé pour des mesures locales.
Sur un semi-conducteur lamellaire, une diode PIN est exposée à un point lumineux très fin. Cette exposition entraîne une modification de la résistance locale et, par conséquent, un flux d'électrons à travers quatre électrodes. L'avantage de ce procédé réside dans la mesure continue de la position du point lumineux avec des fréquences de mesure pouvant dépasser 100 kHz. Un inconvénient est la dépendance de la mesure locale de la forme et de la taille du point lumineux, ainsi qu'une connexion non linéaire qui peut être partiellement compensée par des formes d'électrodes spéciales.
Le PSD tétra-latéral 2D est un exemple de ce type de capteur. Il se compose d'une unique diode PIN carrée avec une couche résistive. Lorsqu'une lumière incidente frappe la zone active du capteur, des photocourants sont générés et collectés par quatre électrodes placées le long de chaque côté du carré, près de la limite. Ce type de PSD présente des avantages tels qu'une réponse rapide, un courant d'obscurité beaucoup plus faible, une application de polarisation facile et un coût de fabrication réduit. Sa précision de mesure et sa résolution sont indépendantes de la forme et de la taille du point lumineux, contrairement aux détecteurs de quadrant qui peuvent être facilement affectés par la turbulence de l'air. Cependant, il souffre du problème de non-linéarité. Alors que l'estimation de la position est approximativement linéaire par rapport à la position réelle lorsque le point se trouve dans la zone centrale du PSD, la relation devient non linéaire lorsque le point lumineux s'éloigne du centre. Cela limite sérieusement ses applications et impose des exigences urgentes pour l'amélioration de la linéarité dans de nombreuses applications.
Pour réduire la non-linéarité du PSD tétra-latéral 2D, un nouvel ensemble de formules a été proposé pour estimer la position de la lumière incidente (Song Cui, Yeng Chai Soh : Indices de linéarité et amélioration de la linéarité du détecteur sensible à la position tétra-latéral 2D. IEEE Transactions on Electron Devices, Vol. 57, No. 9, pp. 2106-2117, 2010).
2. Capteurs matriciels (CCD/CMOS)
Les applications les plus courantes de capteurs avec une fréquence d'échantillonnage inférieure à 1000 Hz sont les caméras CCD ou CMOS. Le capteur est divisé en pixels individuels dont la valeur d'exposition peut être lue séquentiellement.
Pour des applications plus rapides, des capteurs matriciels avec traitement parallèle ont été développés. Dans ce cas, la densité lumineuse de chaque pixel est comparée à une valeur seuil globale, à la fois ligne par ligne et colonne par colonne. Les résultats de la comparaison sont ensuite combinés via des liens logiques OR.
Autres Types de Capteurs de Position et de Distance
Bien que les PSD soient spécialisés dans la détection de position de points lumineux, d'autres technologies sont utilisées pour mesurer la distance et la position d'objets.
Capteurs de Déplacement Capacitifs
Les capteurs de déplacement capacitifs sont une famille de capteurs qui utilisent l'effet capacitif pour détecter des variations de faibles distances. Ils sont généralement constitués d'une électrode, souvent de forme circulaire et plane, entourée d'un anneau de garde isolé de l'électrode centrale. L'électrode forme, avec la pièce à mesurer conductrice, un condensateur plan. La mesure de la capacité du condensateur peut être effectuée en lui injectant un courant alternatif et en mesurant la tension qui apparaît à ses bornes.
Ces capteurs sont capables de mesurer la position et le changement de position de matériaux conducteurs avec une haute résolution. Ils peuvent également mesurer l'épaisseur ou la densité de matériaux non conducteurs. Les applications incluent le traitement des semi-conducteurs, l'assemblage d'équipements de précision tels que les disques durs, les mesures précises d'épaisseur, la métrologie des machines-outils et les tests sur chaîne de montage.
Il existe deux types généraux de systèmes de détection capacitive :
- Systèmes pour matériaux conducteurs : Ils utilisent un modèle où le capteur est l'une des plaques conductrices et la cible à mesurer est l'autre.
- Systèmes pour matériaux non conducteurs : Le fonctionnement peut être conceptualisé comme deux condensateurs en série, chacun ayant un diélectrique différent. La somme des épaisseurs des deux matériaux diélectriques reste constante, mais l'épaisseur de chacun peut varier. Le matériau à mesurer déplace l'autre diélectrique. L'espace est souvent un espace d'air (constante diélectrique ≈ 1) et le matériau possède une constante diélectrique plus élevée.
Les capteurs capacitifs peuvent mesurer la position d'objets jusqu'au niveau nanométrique, ce qui est crucial dans l'industrie des semi-conducteurs pour le positionnement précis des wafers de silicium. Dans l'industrie des disques durs, ils sont utilisés pour mesurer le "runout" (déviation de l'axe de rotation) des broches, permettant ainsi de déterminer la quantité maximale de données pouvant être stockée sur les disques.
Capteurs Inductifs
Les capteurs inductifs produisent à l'extrémité de leur tête de détection un champ magnétique oscillant. Ce champ est créé par un circuit (bobine) alimenté par une source de tension sinusoïdale. Si un objet métallique (cible) s'approche de la surface active, des courants de Foucault sont générés dans l'objet. Ces courants s'opposent à la cause qui les a générés, entraînant une perte d'énergie dans le circuit oscillant et une atténuation des oscillations. L'amplitude de cette atténuation est proportionnelle à la distance entre le capteur et la cible.
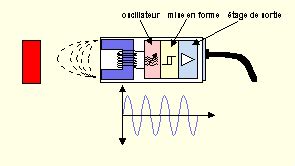
Dans certains cas, le primaire et le secondaire sont constitués d'une seule et même bobine, et la grandeur qui varie avec la distance à la cible est alors l'inductance. Ces capteurs trouvent des applications dans le domaine aéronautique, où la partie électromagnétique du capteur peut être située à l'extérieur (train d'atterrissage, volets) tandis que l'électronique de détection est protégée à l'intérieur de l'avion.
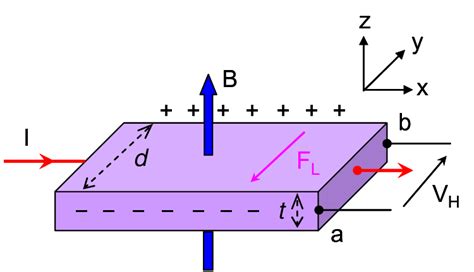
Capteurs à Effet Hall
L'effet Hall se manifeste par l'apparition d'une différence de potentiel (tension de Hall) perpendiculairement aux lignes de courant d'un conducteur placé dans un champ d'induction magnétique. Si un courant traverse un barreau conducteur ou semi-conducteur, et qu'un champ magnétique est appliqué perpendiculairement au sens du courant, une tension apparaît sur les faces latérales du barreau. Cette tension est proportionnelle au champ magnétique et au courant.
Les capteurs à effet Hall sont utilisés pour détecter la présence de champs magnétiques, et par extension, de matériaux magnétiques ou d'aimants. Leur utilisation dans la mesure de distance est souvent indirecte, par exemple en mesurant la position d'un aimant fixé sur un objet mobile.
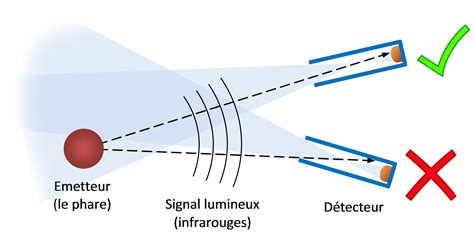
Capteurs Infrarouges (Photoélectriques)
Le capteur de proximité infrarouge, également appelé capteur photoélectrique, se compose d'un émetteur de lumière infrarouge et d'un récepteur. La détection d'un objet se fait par coupure ou variation du faisceau lumineux. Le signal est ensuite amplifié pour être exploité.
Les télémètres infrarouges utilisent souvent le principe de la triangulation. Ils émettent une courte pulsation de lumière infrarouge qui, après avoir rebondi sur un obstacle, est détectée par le récepteur. En mesurant le temps de retour de la lumière ou l'angle entre l'émetteur, l'obstacle et le récepteur, il est possible de déterminer la distance à l'obstacle.
Ces capteurs peuvent fournir une mesure de distance analogique ou numérique, ou simplement signaler si un objet se trouve à une distance inférieure à un seuil prédéfini.
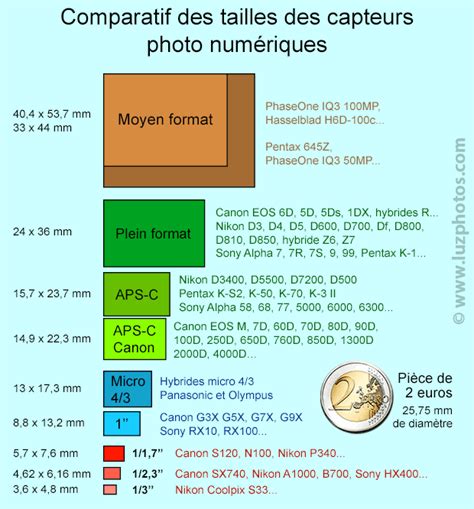
Comparaison des Tailles de Capteurs d'Image
La taille du capteur d'image d'un appareil photo numérique détermine l'angle de champ d'un objectif donné. La taille du capteur est souvent exprimée en format optique, en pouces. Les objectifs conçus pour les appareils photo argentiques 35 mm peuvent être montés sur des boîtiers numériques, mais la différence de taille du capteur par rapport au film 35 mm entraîne un recadrage de l'image, un effet connu sous le nom de "crop factor".
Les différents formats de capteurs incluent :
- Plein format (Full Frame) : Historiquement, les capteurs plein format étaient coûteux à produire. Ils ont une surface d'environ 548 mm² (par exemple, 36 x 24 mm).
- APS-H : Utilisé dans les reflex professionnels haut de gamme, avec une surface d'environ 286 mm² (facteur de recadrage 1.3).
- APS-C : Un format très courant, plus petit que l'APS-H.
- Foveon X3 : Utilisé dans certains appareils Sigma, avec une surface d'environ 23.4 x 15.5 mm (facteur de recadrage 1.7).
- Capteurs "1 pouce" : Utilisés dans les appareils photo compacts haut de gamme, leur surface est près de quatre fois supérieure à celle des capteurs de compacts courants (environ 16 mm de diagonale).
- 1/1.7" : Capteur plus petit, utilisé dans certains appareils comme le Pentax Q7 (facteur de recadrage 4.55).
- 1/2.3" : Le format le plus courant dans les appareils photo compacts et les bridges, en raison des contraintes de taille des objectifs zoom puissants.
- Capteurs de smartphones : De plus en plus grands, certains approchant ou dépassant la taille des capteurs de compacts classiques (par exemple, 1/1.9" pour l'iPhone 13).
- Capteurs "Moyen format" : Les plus grands capteurs disponibles dans les appareils photo commerciaux, faisant référence à des formats similaires au film de moyen format (par exemple, 45 x 30 mm).
Le système de "pouces" utilisé pour décrire la taille des capteurs remonte à l'époque des tubes cathodiques de caméras vidéo. Un tube de 1 pouce de diamètre extérieur avait une zone photosensible d'environ 16 mm de diagonale. Ainsi, un capteur numérique de 1 pouce équivaut à cette zone sensible.
tags: #capteur #psd #a #distance #wikipedia