Formats de fichiers de nuages de points et utilisation dans 3ds Max
Les nuages de points sont devenus un outil essentiel dans de nombreux secteurs, tels que l'architecture, l'ingénierie, la construction, et les arts visuels. Ils représentent des objets ou des environnements en trois dimensions (3D) et sont composés de millions, voire de milliards de coordonnées X, Y et Z, définissant la surface de l'objet ou de l'espace scanné. L'utilisation de ces données numérisées permet de créer des modèles 3D précis à partir de captures de la réalité, sous forme de jeux de données volumineux.
Comprendre les nuages de points
Un nuage de points est une représentation numérique 3D d'un objet ou d'un espace. Il se compose de millions de points, dont chacun est positionné selon un repère de coordonnées x, y et z. Il est possible de produire des nuages de points à différentes échelles, allant d'une pièce mécanique à une ville entière.
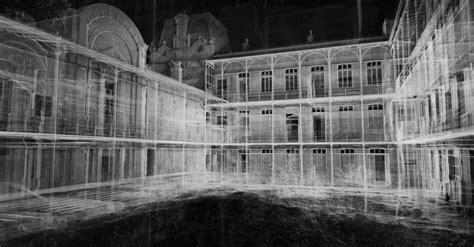
Le nuage de points d'un bâtiment, par exemple, est une empreinte 3D fidèle de sa structure et de ses équipements. En tant que représentation non modifiée ou simplifiée de la réalité, ce format est idéal pour la recherche de détails et les analyses fines, telles que la prise de dimension ou l'analyse de planéité.
Génération de nuages de points : La Lasergrammétrie
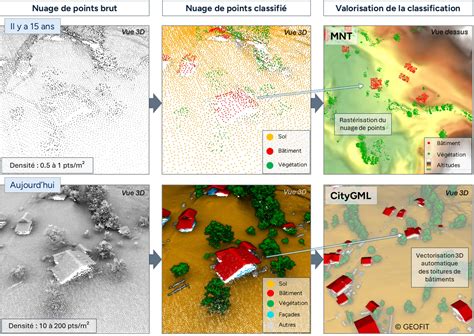
L'acquisition de nuages de points repose sur le principe de la lasergrammétrie, utilisant des capteurs LiDAR intégrés aux scanners 3D et à certains drones. Ces capteurs émettent un faisceau lumineux qui balaie l'environnement. La distance mesurée jusqu'à chaque obstacle permet de positionner un point dans l'espace. La répétition de ce processus lors du balayage constitue le nuage de points brut.
Selon la méthode d'acquisition et les capteurs utilisés, un nuage de points peut être en noir et blanc ou colorisé, cette dernière option résultant de l'utilisation de photos panoramiques prises par le scanner.
Acquisition par scanners terrestres (statiques et dynamiques)
Dans le domaine du bâtiment, les scanners terrestres (statiques et dynamiques) sont les équipements de captation les plus courants. L'utilisation de drones pour relever des façades, toitures ou ouvrages extérieurs est également une évolution notable.
Scanners statiques
Les scanners statiques, montés sur trépied, génèrent des nuages de points particulièrement denses. Ces scanners numérisent un environnement « station par station », chaque station étant une position fixe où le scanner balaye l'environnement. Un nuage de points est généré pour chaque station, et l'ensemble doit ensuite être « recalé » entre eux. Ce recalage peut s'opérer par recouvrement, via la méthode ICP (Iterative Closest Point), ou par le placement de cibles et sphères posées dans l'environnement lors de la captation.
Scanners dynamiques
Les scanners mobiles (ou dynamiques) permettent de numériser l'environnement tout en se déplaçant. Ce principe de captation en mouvement est rendu possible par un système de localisation par cartographie simultanée (SLAM) et une centrale inertielle (IMU). Le nuage de points capté couvre une zone entière parcourue par l'opérateur. Il est ensuite nécessaire d'assembler chaque nuage de points, souvent en utilisant des cibles communes à plusieurs nuages ou des coordonnées relevées par une station totale.

Formats de fichiers de nuages de points
Il existe une multitude de formats de fichiers pour les nuages de points, chacun avec ses spécificités :
- OBJ : Adopté par une large gamme d'applications, il est populaire dans la modélisation 3D et la numérisation d'objets.
- PLY (Polygon File Format ou Stanford Triangle Format) : Conçu pour surmonter certaines limitations d'OBJ, il est capable de représenter la couleur, la transparence, les normales de surface, la texture et les coordonnées.
- LAS (Laser Aided Scanning) : Un standard de l'industrie pour les données de scanners laser, largement utilisé dans la cartographie, l'arpentage, la gestion forestière, et l'analyse d'infrastructures urbaines.
- E57 : Un format de fichier indépendant et standardisé, permettant de stocker les données d'un nuage de points et d'autres métadonnées produites par les scanners laser. Il combine la flexibilité du XML pour les métadonnées et l'efficacité du binaire pour les données volumineuses.
- PTS, PTX : Ces formats stockent des données de scans laser 3D.
- XYZ : Un format simple contenant des coordonnées spatiales, parfois des informations de couleur. Il est lisible par l'homme mais présente des limitations en termes de taille de fichier et de perte de précision numérique.
- PCG, RCS, RCP : Formats de fichiers développés par Autodesk, adaptés à leur suite logicielle.
- FLS (Faro) : Intégration matériel-logiciel spécifique aux scanners Faro.
Le choix du format dépend des exigences du projet et des logiciels utilisés. Pour des besoins de modélisation 3D simples, OBJ et PLY sont des choix populaires, tandis que LAS s'impose pour les grandes quantités de données issues de scanners laser. E57 est de plus en plus utilisé comme format standard industriel.
Utilisation des nuages de points dans 3ds Max
3ds Max offre des fonctionnalités robustes pour travailler avec des nuages de points, permettant d'importer des données volumineuses et de les utiliser comme base pour la modélisation 3D.
Importation et visualisation
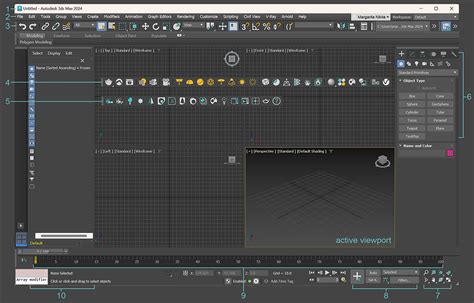
Pour travailler avec des nuages de points dans 3ds Max, vous devez accéder au groupe de fonctions Créer, sélectionner Géométrie, puis choisir Objets nuage de points dans la liste déroulante. Ensuite, dans le panneau déroulant Type d'objet, sélectionnez PointCloud.
Après avoir créé un objet nuage de points, vous pouvez charger un fichier de nuage de points (formats RCS ou RCP) via le bouton "Charger un nuage de points" dans le panneau déroulant Source de nuage de points.
Il est possible d'ajuster la taille des points pour une meilleure visibilité dans le panneau déroulant Affichage, groupe Affichage du point. Les contrôles de navigation de la fenêtre permettent de cadrer l'ensemble des données importées.
Manipulation et modification
Une fois l'objet nuage de points dans la scène, il peut être transformé comme n'importe quel autre objet. Il est également possible de modifier son matériau et de faire en sorte que d'autres objets de la scène projettent des ombres sur celui-ci.
Zone de limite
La fonction "Zone de limite" permet de masquer des parties spécifiques d'un nuage de points. Elle crée un volume (une boîte) qui définit quelles parties du nuage seront visibles (à l'intérieur ou à l'extérieur du volume). Vous pouvez déplacer, faire pivoter et mettre à l'échelle cette zone.
Pour activer la zone de limite, sélectionnez l'objet nuage de points, assurez-vous que l'option "Activer la zone de limite" du panneau déroulant Zone de limite et volumes est activée. Les transformations de cette zone (sélection, déplacement, rotation, mise à l'échelle) permettent de contrôler la visibilité du nuage de points.
Volumes d'affichage
Pour masquer plusieurs parties non contiguës des données, la fonction "Volumes d'affichage" peut être utilisée en conjonction avec des primitives de géométrie (Boîte, Sphère, Plan). Lorsque cette option est activée, d'autres objets de la scène peuvent être utilisés pour spécifier les parties visibles du nuage de points.
Modélisation à partir de nuages de points
Les nuages de points peuvent servir de modèle pour créer une géométrie standard, comme des objets poly éditables. Vous pouvez ensuite utiliser des techniques de modélisation traditionnelles (extrusion, etc.) pour personnaliser l'objet.
Pour cela, activez l'accrochage 3D et configurez-le pour accrocher aux "Sommet de nuage de points" dans la catégorie Objets nuage de points. Vous pouvez ensuite créer des polygones en cliquant sur les sommets du nuage de points.
Paramètres d'affichage et de rendu
3ds Max offre plusieurs options pour contrôler l'apparence des nuages de points dans les fenêtres et lors du rendu.
Méthodes de coloration
- Couleur unique : Applique une couleur unie à l'objet.
- True Color : Affiche les couleurs d'origine du fichier de nuage de points, généralement fidèles à l'objet numérisé.
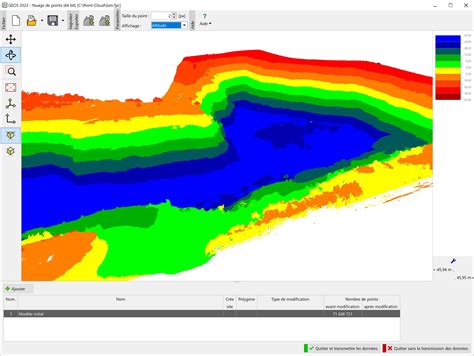
- Rampe Élévation : Applique un dégradé de couleur basé sur l'altitude de l'objet, utile pour visualiser les différences de hauteur.
- Rampe Intensité : Applique un dégradé basé sur les valeurs de luminance des couleurs d'origine du nuage de points.
- Rampe Normale : Applique une couleur en fonction de la normale de chaque point.
Niveau de détail
Le paramètre "Niveau de détail" détermine le nombre de points visibles dans les fenêtres et, potentiellement, dans le rendu. Glisser la glissière vers la gauche améliore les performances, tandis que la déplacer vers la droite augmente la qualité visuelle.
L'option "Fixe dans le rendu" permet de contrôler le nombre de points rendus indépendamment des paramètres de visualisation des fenêtres.
Affichage du point
- En tant que Pixel : Chaque point visible est affiché comme un pixel unique. Un paramètre numérique sert de multiplicateur de la taille de pixel.
- Échelle réaliste : Affiche la taille des points selon une échelle définie par le paramètre "Échelle de l'unité d'affichage".
Pour obtenir de bonnes performances tout en conservant un objet apparemment solide, il est conseillé d'utiliser un paramètre "Affichage du point" relativement élevé avec un "Niveau de détail" faible.
Using Pointclouds in 3D Studio Max
Interopérabilité et bonnes pratiques
Face à la prolifération des formats de fichiers de nuages de points, l'interopérabilité entre différents logiciels et systèmes est un enjeu majeur. Des formats comme E57 visent à standardiser l'échange de données.
Conseils pour une gestion efficace :
- Privilégier E57 pour l'archivage.
- Utiliser PLY pour l'analyse CAO.
- Réserver FBX pour la visualisation immersive.
- Valider systématiquement les conversions de formats.
- Définir un format pivot pour les échanges internes.
- Implémenter des contrôles qualité post-conversion.
- Maintenir une documentation actualisée des processus d'interopérabilité.
En respectant les exigences système et en explorant les plugins disponibles, les professionnels peuvent optimiser leur flux de travail de modélisation 3D avec des données de nuages de points.
tags: #format #fichier #point #cloud #for #3ds